Cybercognition - Cybernetic Computational Cognition Theory -© 2014
.
.
The Cybernetic-Computational Engine - an intelligent agent with internal experience
by Charles Dyer BE (Mech.) BSc (Hons). Copyright © October 2014
Subjectivity
by Charles Dyer BE (Mech.) BSc (Hons). Copyright © October 2014
Subjectivity
Once the reader understands the basic mechanism by which subjectivity arises, either in machinery or in biology, then the remaining knowledge is acquired very easily, because the learning process is not hampered by the existence of nagging doubts of a scientific nature that lurk in the epistemological background of their cogitations. If the reader fails to understand these critical ideas, usually by failing to fully utilize the visual framework necessary for their satisfactory exposition, then they will never accept the compelling reality of conscious machinery and strong-AI theory. This set of ideas arose first during the 1920's in the cybernetics theory of Jacob von Uexkull . The next person who understood their importance was William T. Powers, who used them to construct a psychological theory of healing, called the 'method of levels'. The most recent independent researcher to understand the concepts is Charles Dyer, from Flinders University[1], in South Australia.
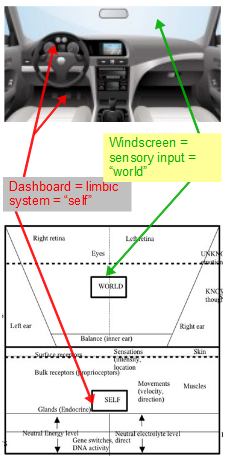
 Understanding of subjectivity starts and ends with the following dictum - everything we know about is sensory in nature. Immanuel Kant understood this, in the deep sense that it is being used here. First, consider the basic 'sandwich' system model, consisting of an opaque, 'black box' system model, 'sandwiched' between an input window (sensor channel) and an output device (motor channel), where the channels are understood to be producers and consumers of Shannon-type information symbols. What this dictum means is that the only sorts of things that can be perceived inside the system box are those that enter through the sensor window. Even the motor channel entities are perceived via the sensor window. The easiest way to 'grok' [2] this is to imagine that you are driving a car. Your knowledge of the car's position and orientation (its 'pose') on the road comes via the windshield. Your knowledge of the car's inner state comes via the dashboard, eg via the oil pressure, coolant temperature and charging voltage gauges. However, so does your visual awareness of your own hands and feet controlling the vehicle, via the steering wheel, and gas and brake pedals. EVERYTHING in the vehicle is perceived via the total driver display, that is, windshield (view of road situation) plus dashboard (view of vehicle state).
Understanding of subjectivity starts and ends with the following dictum - everything we know about is sensory in nature. Immanuel Kant understood this, in the deep sense that it is being used here. First, consider the basic 'sandwich' system model, consisting of an opaque, 'black box' system model, 'sandwiched' between an input window (sensor channel) and an output device (motor channel), where the channels are understood to be producers and consumers of Shannon-type information symbols. What this dictum means is that the only sorts of things that can be perceived inside the system box are those that enter through the sensor window. Even the motor channel entities are perceived via the sensor window. The easiest way to 'grok' [2] this is to imagine that you are driving a car. Your knowledge of the car's position and orientation (its 'pose') on the road comes via the windshield. Your knowledge of the car's inner state comes via the dashboard, eg via the oil pressure, coolant temperature and charging voltage gauges. However, so does your visual awareness of your own hands and feet controlling the vehicle, via the steering wheel, and gas and brake pedals. EVERYTHING in the vehicle is perceived via the total driver display, that is, windshield (view of road situation) plus dashboard (view of vehicle state).Unlike the Cartesian Homunculus, however, this model does permit inwards jumping of recursive levels, while retaining meaning. The windshield is clearly analogous to your visual perception capacity, while the more automatic mental faculties are comparable to the other vehicle control and monitoring aids. The trip computer might be comparable to your vestibular (balance and motion) organ in your inner ear, your speedometer comparable to your sense of visual flow, and the joint motion sensors in your shoulders, elbows, hips and knees are comparable to the driver's knowledge of pedal and steering wheel position. These are crude analogies, but here is where the visual part of the understanding process plays an important role. In the diagram, Jacob von Uexkull's concepts (written in german, his native tongue) have been superimposed upon the various parts of the vehicle windscreen/ dashboard analogy, which has been rather presumptuously titled 'The Cartesian Dashboard', to remind the reader of the dysfunctional and philosophically challenged 'Cartesian Theater', which of course leads to infinite regression.
1. This is the same geographically obscure institution which fostered the amazing and successful minds of both Rodney Brooks (world class roboticist) and David Chalmers (world class philosopher of mind).
2. I fear the term 'grok', like this user, has already passed from the 'wired' to the 'tired' category, much like its hippy-era predecessor 'dig'.
.
2. I fear the term 'grok', like this user, has already passed from the 'wired' to the 'tired' category, much like its hippy-era predecessor 'dig'.
.
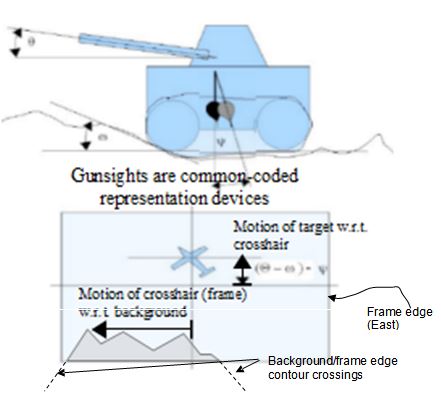 There is another way to 'come at' the problem of imagining how to model subjectivity, and that is the 'brute force' method- by trying to do it mathematically, as would an engineer. In the upper diagram, an objective model can be made by using typical parametric shape functions (cosines, sines, polynomials) to describe both the spatial motion S(s) of the 'tank' along the ground as well as the temporal motion T(t) of the jet in the air. Therefore, an (a priori) motion modelling function F(S,T) can be made, which, when suitably differentiated and integrated, can be used to control the gun aiming motor. The problem is, F is different for every combination of ground journey S and jet trajectory T. While an objective gun control function is theoretically possible for each case, a general purpose objective function is impracticable. There are only two possibilities - (a) a closed form non-cybernetic mathematical description, eg a formula for the gun control motor and fire switch solenoid, can be prepared ahead of time, that is, prior to the actual tracking of the moving target. (b) an open form, real-time, cybernetic tracking loop algorithm does not need to know about fire-time events or parameters. The loop tracks the target's motion step, and updates any parametric data needed to improve RMS accuracy.
There is another way to 'come at' the problem of imagining how to model subjectivity, and that is the 'brute force' method- by trying to do it mathematically, as would an engineer. In the upper diagram, an objective model can be made by using typical parametric shape functions (cosines, sines, polynomials) to describe both the spatial motion S(s) of the 'tank' along the ground as well as the temporal motion T(t) of the jet in the air. Therefore, an (a priori) motion modelling function F(S,T) can be made, which, when suitably differentiated and integrated, can be used to control the gun aiming motor. The problem is, F is different for every combination of ground journey S and jet trajectory T. While an objective gun control function is theoretically possible for each case, a general purpose objective function is impracticable. There are only two possibilities - (a) a closed form non-cybernetic mathematical description, eg a formula for the gun control motor and fire switch solenoid, can be prepared ahead of time, that is, prior to the actual tracking of the moving target. (b) an open form, real-time, cybernetic tracking loop algorithm does not need to know about fire-time events or parameters. The loop tracks the target's motion step, and updates any parametric data needed to improve RMS accuracy.Compare the onerous task of constructing objective functions to the relative ease of constructing the subjective gun aim function - just turn it into a homeostat form, like the simple thermostat that controls room heaters and apartment basement boilers. The algorithm is simplicity itself-
1. obtain current weapon system state- difference = (target position - crosshair position )
2. increase crosshair position by means of gun aim motor so that difference is reduced.
3. fire gun when when difference = (less than or equal to aiming error)
This algorithm is equivalent to what was once called TOTE ( test-operate-test-exit) by the cybernetics school of systems science.
Summarising this result, an impenetrable objective modelling problem has been made computationally trivial by the use of subjective modelling technique- a perception or sampling frame, in this case, the gunsight. Everything is expressed in terms of subjective (gunsight) coordinates. In Bill T. Powers Perceptual Control Theory, or PCT (1977), Powers implemented a practical psychotherapeutic application of Von Uexkull's embodied semantics, which he called the 'method of levels'. Powers made it his core business to indoctrinate all interested or needy parties in the following very important idea- behaviour is caused by the (seemingly indirect) control of subjective perceptual projection, rather than the more obvious (and wrong!) direct control of objective motion trajectory. To this author's knowledge, Powers is the first researcher to apply computational paradigms to real world issues (the method of levels is not unlike the actions of a multi-pass compiler).